Lorentz Spaces
Cf. students version in GermanTime-, space- and light-like vectors
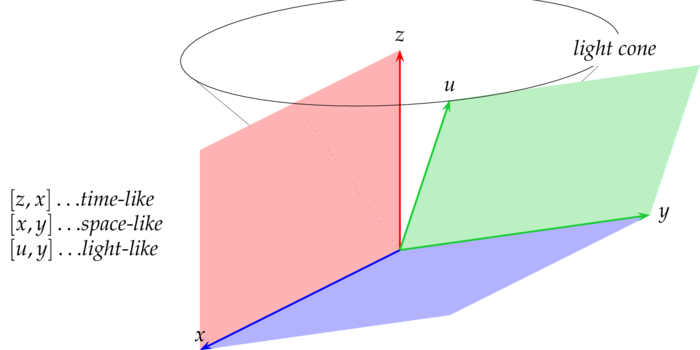
Let $(E,\la.,.\ra)$ be a Lorentz space of dimension $n+1$, i.e. there is a basis $e_0,\ldots,e_n$ for $E$, such that $$ \la e_j,e_k\ra=\e_j\d_{jk} \quad\mbox{where}\quad \e_0=-1 \quad\mbox{and}\quad \forall j\geq1:\e_j=+1 $$ The causal character of a vector $x\in E\sm\{0\}$ depends on the value of $\la x,x\ra$: it is called time-like if $\la x,x\ra < 0$, causal if $\la x,x\ra\leq0$, light-like if $\la x,x\ra=0$ or space-like if $\la x,x\ra > 0$. A non-degenerated subspace $F$ of $E$ must have index $0$ - in which case $(F,\la.,.\ra)$ is Euclidean - or $1$ - in which case $(F,\la.,.\ra)$ is a Lorentz space. In the former case we say $F$ is space-like and in the latter case: $F$ is time-like. If $F$ is neither Euclidean nor a Lorentz space, then $F$ is degenerated and we say $F$ is light-like.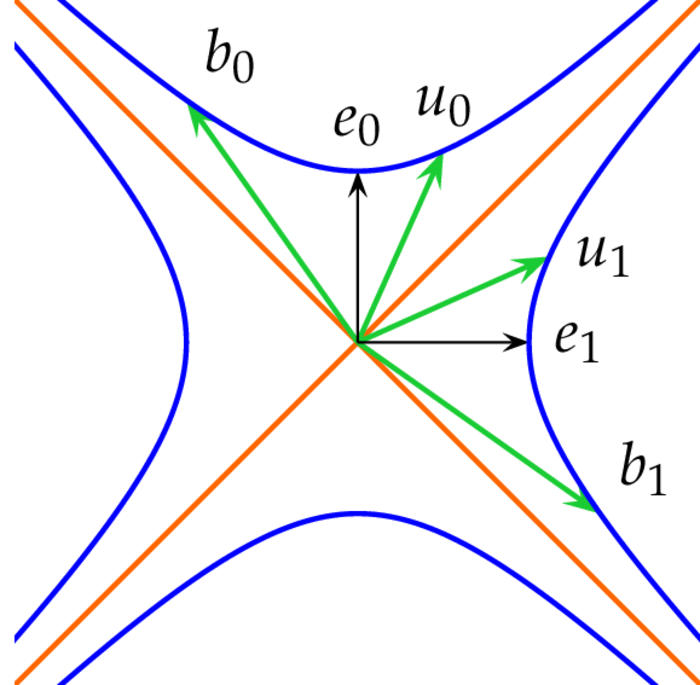
Suppose $x,y$ are two causal vectors such that $\la x,y\ra=0$. Then $x,y$ are linearly dependent. Suggested solution.
The Gram-Schmidt algorithm terminates successfully in a Lorentz space if the first vector is time-like. By rearranging vectors the algorithm works if one of the vectors is time-like!
Suppose $(E,\la.,.\ra)$ is Euclidean and $z\in E$ a unit vector. Then
$$
g(x,y)\colon=\la x,y\ra-2\la x,z\ra\la y,z\ra
$$
is a Lorentz product on $E$ and $z$ is a time-like unit vector in $(E,g)$. 2. Conversely if $(E,\la.,.\ra)$ is a Lorentz space and $z\in E$ a time-like unit vector, then
$$
g(x,y)\colon=\la x,y\ra+2\la x,z\ra\la y,z\ra
$$
is a Euclidean product on $E$ and for all $x,y\in E$ we have (suggested solution):
$$
|\la x,y\ra|\leq3|x||y|
\quad\mbox{where}\quad
|x|^2\colon=g(x,x)~.
$$
The previous example shows how to define a Euclidean product and thus a metric and a compatible topology on a Lorentz space. Compatibility means that addition and scalar multiplication are continuous operations. Well, all compatible topologies on a finite dimensional vector space are equivalent, but still there are bases of topologies on Lorentz spaces which are somehow better adapted, e.g. the one discussed in exam.
If $z$ is a light-like vector in the Lorentz space $(E,\la.,.\ra)$, then
$$
\forall x,y\in E:\quad
g(x,y)\colon=\la x,y\ra+\la x,z\ra\la y,z\ra
$$
is again a Lorentz product on $E$. Suggested solution.
As for the causal character of a subspace $F$ the following proposition asserts that one may equivalently check the causal character of $F^\perp$:
$\proof$
1. Obviously we only have to prove that a subspace $F$ of dimension $k$ of the $n$-dimensional Lorentz space $E$ is time-like, if it contains a time-like vector $x$. Since $G\colon=F\cap\lhull{x}^\perp$ is space-like and $F=G\oplus\lhull{x}$, the index of $F$ is $1$, i.e. $F$ is time-like.2. If $F$ is space-like, then $E=F\oplus F^\perp$ and $F^\perp$ is non-degenerated and thus it`s time- or space-like. Suppose $F^\perp$ doesn`t contain a time-like vector, then $F^\perp$ is space-like and thus $E=F\oplus F^\perp$ is Euclidean. Conversely if $F^\perp$ is time-like, then it contains a time-like vector $x$ and thus $F\sbe F^{\perp\perp}\sbe x^\perp$ is space-like.
3. $F$ is light-like iff $F$ is degenerated and by lemma this holds if and only if $F^\perp$ is degenerated, which by definition is equivalent to $F^\perp$ is light-like. If $\dim(F\cap F^\perp)=1$, then $F$ is degenerated, i.e. light-like. Conversely if $F$ is degenerated, then $\dim(F\cap F^\perp)\geq1$. If $\dim(F\cap F^\perp)\geq2$, then $F\cap F^\perp$ must contain a space-like vector, which is impossible. $\eofproof$
Suppose $\dim F\geq2$, then $F$ is time-like iff $F$ contains two linearly independent light-like vectors. Suggested solution.
Computational aspects
In general the causal character of a subspace $F$, generated by linearly independent vectors $b_1,\ldots,b_n$ in a Lorentz space $(E,\la.,.\ra)$, can be determined by detecting the index of $\la.,.\ra|_{F\times F}$. By the remarks following the Lagrange-Sylvester Theorem this can in general be done by computing the eigen-values of the Gramian $A\colon=(\la b_j,b_k\ra)_{j,k=1}^n$ (cf. e.g. exam). In case of a Lorentz space the determinant of $A$ suffices: $F$ is light-like iff $0$ is an eigen-value and this happens if and only if $\det A=0$. $F$ is time-like iff $A$ has exactly one strictly negative eigen-value and all the others are strictly positive and this happens if and only if $\det A < 0$. Eventually, $F$ is space-like iff $A$ has only strictly positive eigen-values and this happens if and only if $\det A > 0$. The Gramian of the vectors $b_1,b_2$ and $b_3$ is given by the matrix $$ \left(\begin{array}{ccc} 3&0&-3\\ 0&5&-2\\ -3&-2&4 \end{array}\right) $$ and the determinant of this matrix equals $3$. Hence $F$ is space-like.
Find vectors $x\in\R_1^4$ in the previous examples such that $F=x^\perp$. Check the causal character of $x$. Suggested solution.
Find necessary and sufficient conditions on the quadratic form $ax^2+2bxy+cy^2$ on $\R^2$ such that the corresponding symmetric bi-linear form defines a Lorentz product on $\R^2$. Suggested solution.
Since the norm $\Vert x\Vert\colon=\sqrt{|\la x,x\ra|}$ on a Lorentz space is not a norm in the usual sense, there is no such notion as 'distance' - the 'distance' of two arbitrary vectors in a Lorentz space is in general not defined; it`s only defined for vectors in certain sub-spaces (cf. section).
Both the set of all time-like vectors $Z$ and the set of all space-like vectors are cones but not sub-spaces. So it may indeed happen that the sum of two space-like or two time-like vectors are of any causal character. Though for an orthonormal basis $b_1,\ldots,b_n$ of a Lorentz space $(E,\la.,.\ra)$ there must be exactly one index $j$ such that $\la b_j,b_j\ra=-1$, an arbitrary basis of a Lorentz space need not contain a time- or space-like vector at all: for example, the basis vectors $e_0-e_1,e_0+e_1$ for $\R_1^2$ are light-like! Finally light-like sub-spaces of an $n$-dimensional Lorentz space can be of any dimension less than $n$: the vectors $e_0+e_1,e_2,\ldots,e_{n-1}$ generate a light-like $(n-1)$-dimensional subspace of $\R_1^n$.
The space $E$ of all complex hermitian $2\times2$ matrices is the space of all matrices
$$
\left(
\begin{array}{cc}
x& u-iv\\
u+iv&y
\end{array}\right)
\quad
x,u,v,y\in\R~.
$$
1. Verify that $E$ has real dimension four and $A\mapsto-\det(A)$ is a quadratic form on $E$. Thus there is a unique symmetric bi-linear form $g$ on $E\times E$ such that $g(A,A)=-\det(A)$. 2. Show that $g$ is a Lorentz product. 3. The subspace $F\colon=\{A\in E:\tr A=0\}$ is space-like and the identity is a time-like vector and $F$ is orthogonal to the identity. Suggested solution.